Tutorials
Protocols
Learn More
UART Operations
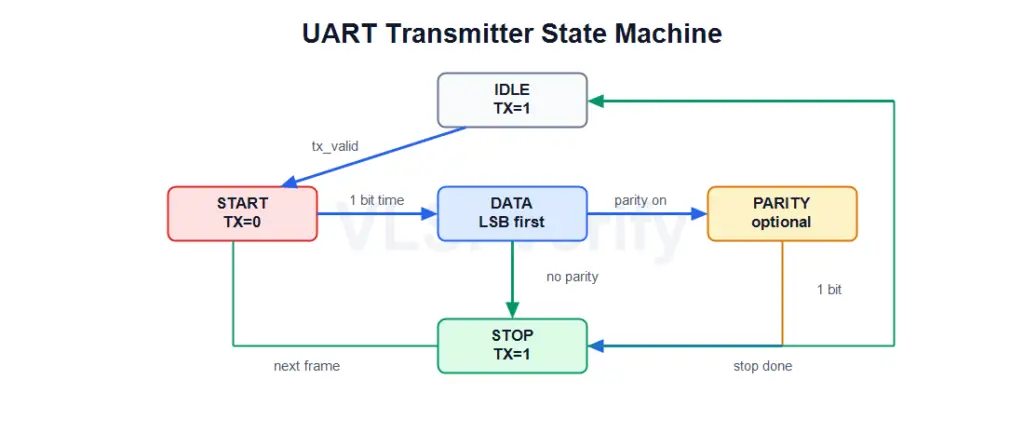
Transmitter Operation
The transmitter converts a parallel data word into a serial frame.
Basic transmit sequence:
- Wait in idle state with TX = 1.
- Accept a data word when the transmitter is not busy.
- Drive the start bit, TX = 0, for one bit time.
- Shift data bits out, LSB first.
- Optionally transmit parity.
- Drive stop bit(s), TX = 1.
- Return to idle or start the next frame.
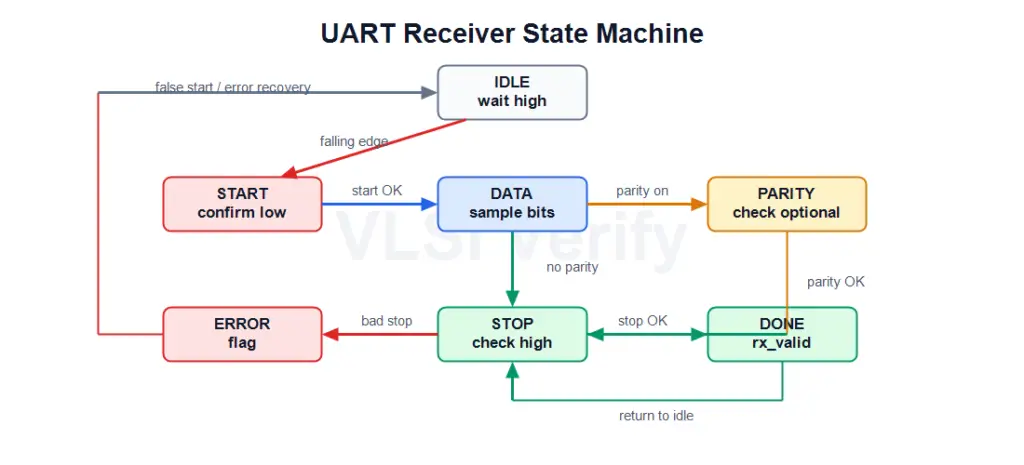
Receiver Operation
The receiver watches the serial input and reconstructs the frame.
Basic receive sequence:
- Wait for idle/high line.
- Detect a high-to-low transition that may be a start bit.
- Confirm the start bit near its middle.
- Sample each data bit near the middle of its bit time.
- Check optional parity.
- Check stop bit.
- Deliver received data and status flags.
Oversampling
Many UART receivers oversample the input, commonly at a multiple of the baud rate, to detect the start edge and choose a stable middle-of-bit sample point. For example, a receiver may use a 16x internal sampling clock, detect the start transition, then sample near the midpoint of the start bit and later bits.
Oversampling is a common implementation technique. It is not a requirement of the abstract UART frame format.
Parity
Parity adds one optional bit after the data bits.
| Mode | Meaning |
|---|---|
| None | No parity bit |
| Even | Total number of 1 bits across data plus parity should be even |
| Odd | Total number of 1 bits across data plus parity should be odd |
Example for data 8’b0101_0011:
Data ones = 4
Even parity bit = 0, because total ones already even
Odd parity bit = 1, because total ones must become oddParity can detect many single-bit errors, but it is not a strong integrity mechanism. It cannot detect all multi-bit errors and does not correct data.
UART Error Conditions
| Error | Generic meaning | Typical cause |
|---|---|---|
| Framing error | Stop bit was not observed as expected | Baud mismatch, noise, wrong frame config, line stuck low |
| Parity error | Received parity does not match data | Noise, wrong parity setting, bit corruption |
| Overrun error | New data arrived before previous data was consumed | Software too slow, insufficient buffering |
| Break-like condition | Line held low longer than a normal character frame | Deliberate break signaling, fault, wiring issue |
Note: Exact status flag names and clearing behavior are implementation-specific. A generic tutorial should explain the concept without assuming a register model.
UART Protocol